NASA's Curiosity Mars Rover

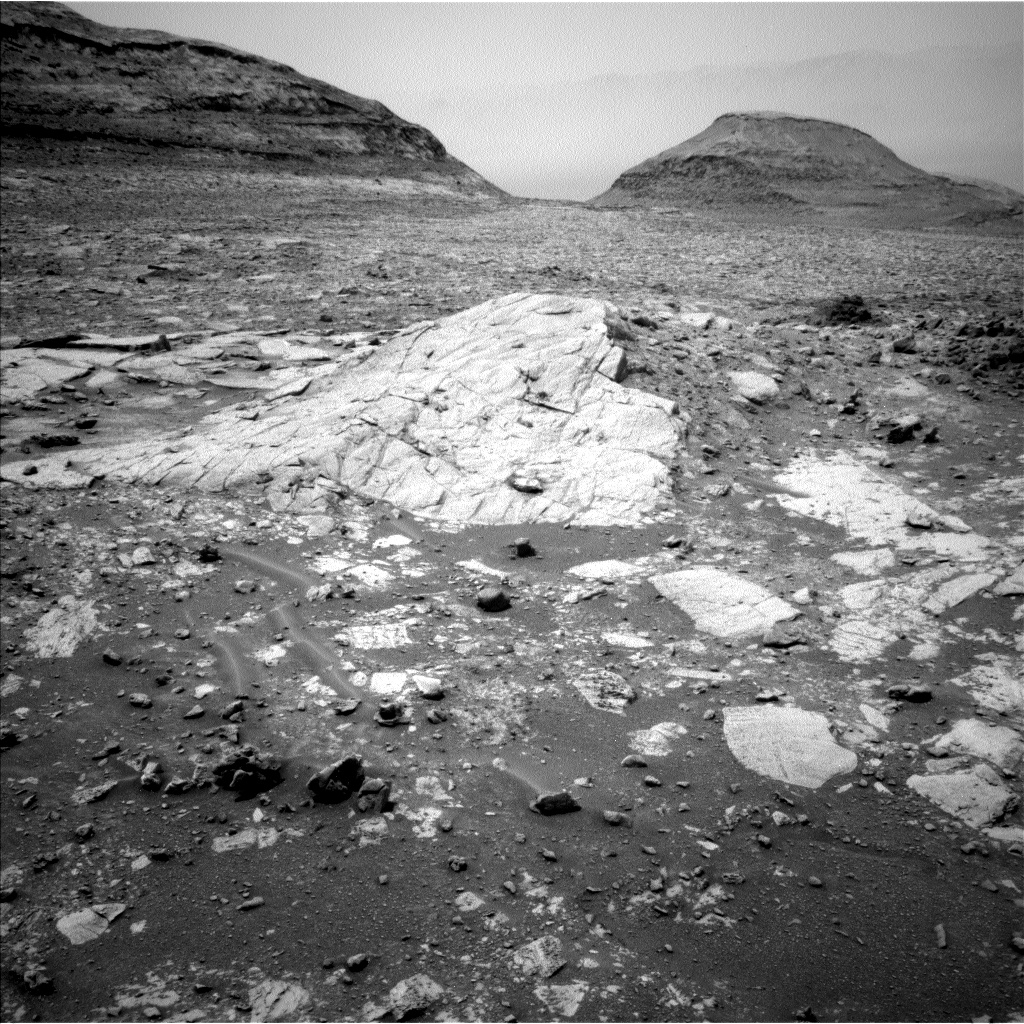
Where the Streets Have No Name - Curiosity Rover Blog for Sols 4336-4337. Earth planning date: Wednesday October 16, 2024 Curiosity continues to drive along the western edge of the upper Gediz Vallis channel. After exiting the channel a few weeks ago, we turned north to image the “back side” of the deposits that we investigated on the eastern side before the channel crossing. As a member of the Channel Surfers working group, we believe that acquiring these views will help further our understanding of the geometry, nature, and evolution of these landforms. The bumpy terrain in front of us, however, plays a role in determining our route and length of drive. The rover planners on the team always do a fantastic job in charting the course on this once-in-a-lifetime road trip. I like to imagine Curiosity with the windows down, blaring U2, as she steadily blazes a new path across the sulfate unit. With an eye towards imaging in this two-sol plan, Mastcam crafted a large mosaic of “Fascination Turret” that rises above the channel floor. ChemCam fit an unprecedented number of long distance RMI images in the plan that will document the upper extent of the white stone deposit, the nature of the “Kukenan” mound, and characterize the rocks in Fascination Turret at targets named “Chimney Tree” and “Forgotten Canyon.” In our immediate workspace, ChemCam used the Laser Induced Breakdown Spectroscopy (LIBS) instrument on a laminated (very thinly bedded) bedrock in the workspace at “Puppet Lake” to determine its chemical composition, which will be documented with a coordinating Mastcam image. MAHLI and AXPS teamed up to analyze a cluster of small gray rocks in front of us at “Jumble Lake.” The second sol includes a 25-meter (about 82 feet) drive to the west/northwest as we continue along our path adjacent to the channel. The Environmental theme group included a range of activities such as a Mastcam tau that will measure the optical depth of the atmosphere and constrain aerosol scattering properties, dust devil movies, and a suprahorizon movie to monitor clouds. Written by Sharon Wilson Purdy, Planetary Geologist at the Smithsonian National Air and Space Museum Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4336-4337-where-the-streets-have-no-name/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

Planning with Popsicles - A Clipper Celebration! - Curiosity Rover Blog for Sols 4334-4335. Earth planning date: Monday October 14, 2024 Today was an unusually exciting day during tactical planning on the Curiosity mission because it intersected with a momentous event in space exploration: the launch of Europa Clipper from Kennedy Space Center. Even though the launch window occurred right in the middle of our morning planning meetings, at 9:06 a.m. PDT to be specific, today’s Tactical Uplink Lead and Science Operations Working Group Chair agreed it would be OK for the entire tactical team to take a 15-minute pause to turn on NASA TV and watch the launch together. Down the hall the Perseverance rover tactical team had decided the same, and for a few moments, the two teams paused their planning and watched together in anticipation as the countdown ticked down to T-0. Many of my close friends and co-workers had worked for years — some for decades — to make this mission a reality, and it was amazing to watch the enormous rocket carrying the Clipper spacecraft leap off the pad knowing how hard it was to get to this point. I cannot wait for the mission’s discoveries once it reaches Jupiter’s watery moon Europa! In true JPL tradition, we of course had to commemorate the event with some sweet frozen treats on-lab. Back when Curiosity landed, we had a full fridge of ice cream that was kept stocked for the first 90 sols of the mission. (Eating ice cream cones at 2 in the morning is a core memory of mine from those early days in our mission.) Today, in a clever nod to Europa’s icy surface, we celebrated with some even icier sweets: fruit and coffee popsicles to anyone on-lab. I chose coffee of course; the caffeine was great to help me get through a busy day of planning for Curiosity! On Mars, things with our rover are going well. We completed our mega ~50-meter drive (about 164 feet) over the weekend, which took Curiosity further north along the western side of Gediz Vallis channel. Our plan today is a “touch and go,” which means we’ll do contact science with APXS and MAHLI on a block in front of us named “Dollar Lake,” some remote sensing, including ChemCam LIBS of a target named “Cape Horn” and a couple Mastcam mosaics, followed by a drive to the north. We’ll continue to follow the western side of Gediz Vallis channel as we descend slightly down Mount Sharp, until we reach a location where we are able to head west towards a more easily traversable valley, and then restart our ascent. What a fun day of planning today. Congratulations to everyone involved helping Europa Clipper reach this incredible milestone, and go Clipper go! Written by Abigail Fraeman, Planetary Geologist at NASA's Jet Propulsion Laboratory Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4334-4335-planning-with-popsicles-a-clipper-celebration/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

Today’s Rover ABC – Aurora, Backwards Driving, and Chemistry, with a Side of Images - Curiosity Rover Blog for Sols 4331-4333. Earth planning date: Friday October 11, 2024 This blogger is in the United Kingdom, just north of London, where we yesterday had beautiful night skies with a red aurora that was even visible with the unaided eye, and looked stunning on photographs. That reminded me of the solar storm that made it all the way to Mars earlier this year. Here is my colleague Deborah’s blog about it: “Aurora Watch on Mars.” And, of course, that was a great opportunity to do atmospheric science and prepare for future crewed missions, to assess radiation that future astronauts might encounter. You can read about it in the article, “NASA Watches Mars Light Up During Epic Solar Storm.” But now, back from shiny red night skies north of London, and auroras on Mars six months ago, to today’s planning! Power — always a negotiation! Today, I was the Science Operations Working Group chair, the one who has to watch for the more technical side of things, such as the question if all the activities will fit into the plan. Today there were many imaging ideas to capture the stunning landscape in detail with Mastcam and very close close-ups with the long-distance imaging capability of ChemCam (RMI). Overall, we have two long-distance RMIs in the plan to capture the details of the ridge we are investigating. You can see in the accompanying image an example from last sol of just how many stunning details we can see. I so want to go and pick up that smooth white-ish looking rock to find out if it is just the light that makes it so bright, or if the surface is different from the underside… but that’s just me, a mineralogist by training, used to wandering around a field site! Do you notice the different patterns — textures as we call them in geology — on the rocks to the left of that white-ish rock and the right of it? So much stunning detail, and we are getting two more RMI observations of 10 frames each in today’s plan! In addition there are more than 80 Mastcam frames planned. Lots of images to learn from! Chemistry is also featuring in the plan. The rover is stable on its wheels, which means we can get the arm out and do an APXS measurement on the target “Midnight Lake,” which MAHLI also images. The LIBS investigations are seconding the APXS investigation on Midnight Lake, and add another target to the plan, “Pyramidal Pinnacle.” On the third sol there is an AEGIS, the LIBS measurement where the rover picks its own target before we here on Earth even see where it is! Power was especially tight today, because the CheMin team does some housekeeping, in particular looking at empty cells in preparation for the next drill. The atmosphere team adds many investigations to look out for dust devils and the dustiness of the atmosphere, and APXS measures the argon content of the atmosphere. This is a measure for the seasonal changes of the atmosphere, as argon is an inert gas that does not react with other components of the atmosphere. It is only controlled by the temperature in various places of the planet — mainly the poles. DAN continues to monitor water in the subsurface, and RAD — prominently featured during the solar storm I was talking about earlier — continues to collect data on the radiation environment. Let’s close with a fun fact from planning today: During one of the meetings, the rover drivers were asked, “Are you driving backwards again?” … and the answer was yes! The reason: We need to make sure that in this rugged terrain, with its many interesting walls (interesting for the geologists!), the antenna can still see Earth when we want to send the plan. So the drive on sol 4332 is all backwards. I am glad we have hazard cameras on the front and the back of the vehicle! Written by Susanne Schwenzer, Planetary Geologist at The Open University Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4331-4333-todays-rover-abc-aurora-backwards-driving-and-chemistry-with-a-side-of-images/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech/LANL

Continuing Downhill - Curiosity Rover Blog for Sols 4329-4330. Earth planning date: Wednesday, October 9, 2024 Curiosity is continuing to make good progress downhill along the western edge of the Gediz Vallis channel, allowing us to take another look from a different perspective at this area we've spent many months exploring. The drive from Monday's plan executed as expected, positioning us about 30 meters (about 98 feet) north of our last location. Unfortunately, the rover parked with its right front wheel atop an unstable-looking rock, so we decided to keep the arm stowed rather than risk having the wheel slip with the arm unstowed. As a consequence, our plan today is all remote sensing, kicking off with a LIBS activity on a bedrock target “Sapphire Lake” and long distance RMI mosaics of “Pinnacle Ridge,” which avid readers may remember was a focus of an imaging campaign while we were still in the channel. Mastcam gets its turn on both Sapphire Lake and Pinnacle Ridge, as well as a Mastcam-exclusive target, “Wuksachi,” to document some rover-disturbed regolith and a wheel-scuffed rock surface. This plan's drive is also in the first sol, which will hopefully bring us nearly 40 meters (about 131 feet) further north, closer to our eventual exit from Gediz Vallis. The first sol also sees a small collection of environmental science observations, including Navcam images to monitor dust and sand on the rover deck as well as a Navcam movie looking out over the northern horizon to look for clouds. We haven't been seeing many clouds lately, but we are rapidly approaching the end of the current Mars Year, and the end of the dusty season. (The new year, numbered 38, begins Nov. 12; a Martian year is much longer than one on Earth, taking 687 Earth days to orbit the Sun.) Though the cloudy season won't really pick up steam until February, the “noctilucent cloud season” will be taking place in December and January, which has produced some spectacular images in the past. Today's plan also features an “UltraSPENDI,” or “Shunt Prevention ENV Navcam Drop-In.” This activity takes 18 cloud movies and dust devil movies over three hours and serves to prevent the rover's batteries from remaining fully charged for an extended period of time, which would hurt their long-term health. The second sol of this plan is pretty simple, featuring a Mastcam tau to measure the amount of dust in the atmosphere, a ChemCam AEGIS activity, some more Navcam deck monitoring, and a 360-degree Navcam survey for dust devils around the rover. As always, REMS, RAD, and DAN will be continuing with their usual activities. Written by Conor Hayes, graduate student at York University Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4329-4330-continuing-downhill/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

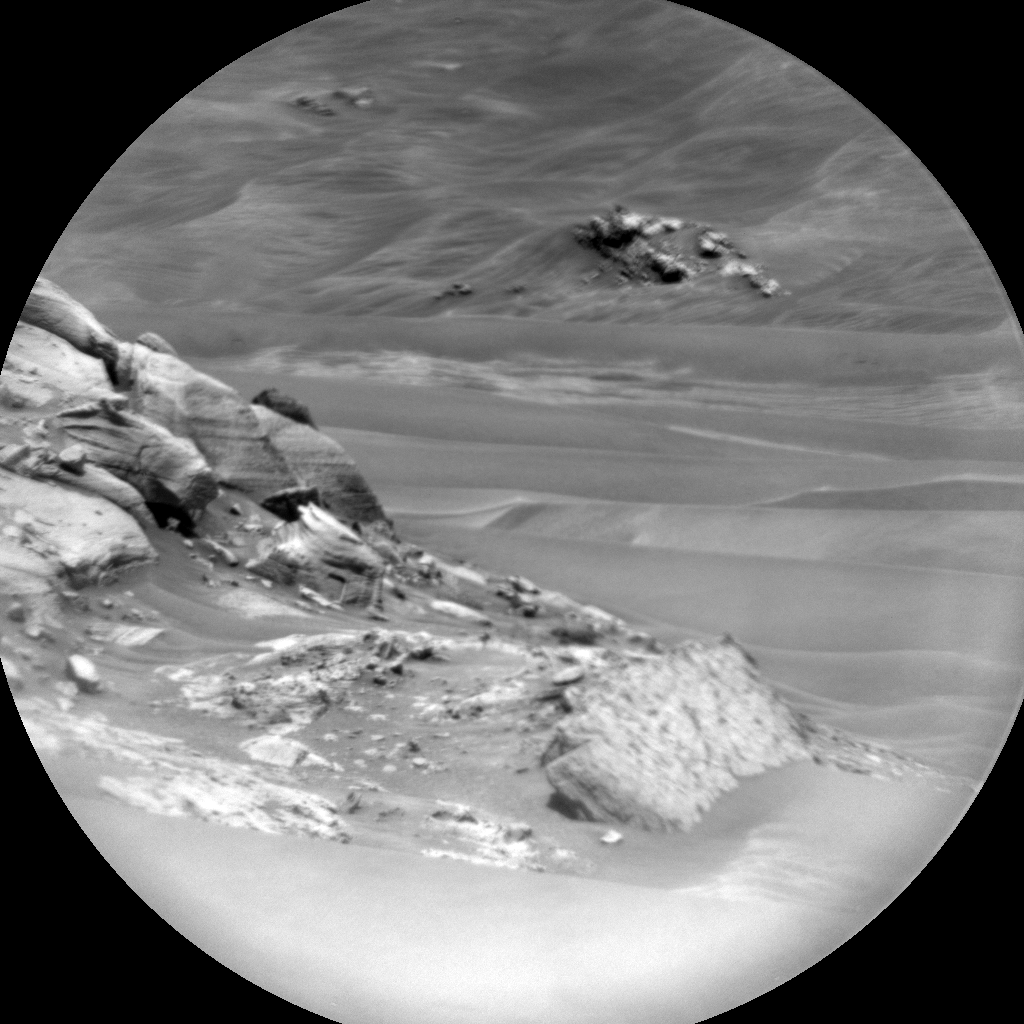
On the Road Again - Curiosity Rover Blog for Sols 4327-4328. Earth planning date: Monday, October 7, 2024 After successfully completing investigations within Gediz Vallis, Curiosity is back on the road through the Mg-sulfate (magnesium sulfate) bearing unit. The terrain under our wheels is a familiar collection of broken up blocks, and we’re keeping our rover eyes on the more distant stratigraphy and the deposits within the Gediz Vallis channel (as seen in the above Navcam image). Our traverse along this side of the channel is a great chance to understand the erosional and depositional history of Gediz Vallis from a different perspective, and to characterize variations in the sulfate unit. I was on shift as Long-Term Planner today, and it was a pretty straightforward two-sol plan, with contact science on the first sol and driving on the second sol. The team planned a great collection of measurements to characterize the rocks in our workspace and more distant features. The plan starts with remote sensing, including ChemCam LIBS on a gray, smooth slab at “Paloma Meadows,” followed by two long-distance RMI mosaics to assess the thickness and distribution of white clasts in Gediz Vallis. Then Mastcam will document Paloma Meadows and a distant dark clast at “Sky Parlor Meadow” to understand the variety of rock types and where they might have come from. The remote sensing block also includes a Navcam observation to search for dust devils. Later in the afternoon Mastcam will acquire a mosaic looking back towards “Whitebark Pass” including the white clasts (some of which were previously tied to observations of high sulfur) and the distribution of deposits within “Pinnacle Ridge.” Then Curiosity will use the instruments on the arm to assess one of the blocks in our workspace at “Pincushion Peak.” We’ll use the DRT, MAHLI, and APXS to assess the grain size, textures, and composition of a nodular block of bedrock. On the second sol Curiosity will acquire ChemCam LIBS and Mastcam of Pincushion Peak, which will make for a nice set of coordinated observations. The second sol also includes a long-distance RMI mosaic of an interesting dark block to assess sedimentary structures, and two Navcam observations to characterize atmospheric opacity and the movement of fines on the rover deck. Then Curiosity will continue driving, and take post-drive imaging to prepare for a similar plan on Wednesday. Looking forward to continuing to explore what’s under our wheels and on the horizon! Written by Lauren Edgar, Planetary Geologist at USGS Astrogeology Science Center. Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4327-4328-on-the-road-again/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

This is just a screen capture from the official map: https://mars.nasa.gov/maps/location/?mission=Curiosity North is up on this map

Data from JPL's JSON URL that is updated after every drive

Curiosity's latest workspace imaged on mission sol 4326 (October 7, 2024) after a drive of 25 meters (82.5 feet). This composite image is assembled from 15 overlapping L-MastCam subframe images, that were Bayer reconstructed before assembly. The workspace covers an area about 2 meters (~6.5 feet) across, and shows details within the workspace accessible to the instruments and tools on the rover's 2 meter-long robotic arm. Image Credits: NASA/JPL-Caltech/MSSS/fredk

(Not Quite) Dipping Our Toes in the Sand - Curiosity Rover Blog for Sols 4325-4326. Earth planning date: Friday, Oct. 4, 2024 If you read this blog very often, you know that nearly every time the rover stops for science, MAHLI and APXS focus on interesting (and accessible!) rocks as targets. The rover science team is, after all, built with a lot of geologists. But geology is not all rocks, all the time — sand is former rock that if buried and pressurized long enough will become rock again. Today was time for sand to shine, as the workspace was cut by troughs of sand of different colors and brightnesses, and it had been nearly 500 sols since we acquired our last dedicated sand measurement with APXS and MAHLI. The “Pumice Flat” target was one of the brighter sand patches while “Kidney Lake” was one of the darker sand patches. APXS uses a special placement mode over sand targets so the instrument gets close, but not too close, to the loose material which could foul up the instrument. Not-rock was also the purview of our environmental observations. Navcam is scheduled for imaging seeking out clouds and dust devils, and changes in the sand and dust on top of the rover deck. Both Navcam and Mastcam will make observations to measure the amount of dust in the atmosphere. REMS will keep track of our weather with regular measurements, RAD will monitor our radiation environment, and DAN will look through rock for signs of water beneath our drive path. Unsurprisingly, the rest of the rover could not ignore bedrock. We managed to squeeze in DRT cleaning of a nice bedrock slab, “Ribbon Fall,” for MAHLI-only imaging. In places, the bedrock slabs were cut by thin veins of darker gray material, similar to dark gray materials we saw in the bedrock on the other side of Gediz Vallis. ChemCam targeted one of these dark gray examples at “Black Divide,” and also rastered across some of the prominent layers visible in the vertical faces in the workspace at the aptly named “Profile View.” Our imaging efforts could be roughly divided between looking back at our path through Gediz Vallis from our new and higher perspective, and looking ahead to what awaits us. ChemCam planned RMI mosaics back toward a field of the white stones we spent time studying in Gediz Vallis and toward a part of the edge of Gediz Vallis that we did not explore previously. Mastcam looked back at the part of the edge of Gediz Vallis we just traversed, “Pilot Peak,” for clues as to why it sits higher than the bedrock farther from the channel edge. They also targeted “Clyde Spires,” which was a gravel ridge in Gediz Vallis of interest as we drove by it initially. Looking ahead, Mastcam imaged a puzzling gray rock sitting atop the bedrock slabs south of us at target “Buena Vista Grove,” and further south still, they planned a large mosaic covering a very big rock — the spectacular “Texoli” butte that has loomed and will continue to loom over our path for months to come. Written by Michelle Minitti, Planetary Geologist at Framework Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4325-4326-not-quite-dipping-our-toes-in-the-sand/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech
 science.nasa.gov
science.nasa.gov
Surfin’ Our Way out of the Channel - Curiosity Rover Blog for Sols 4323-4324. Earth planning date: Wednesday, Oct. 2, 2024 As a member of the group tasked with organizing our campaign to investigate the Gediz Vallis channel and deposit (informally known as the Channel Surfers), I was a little sad this morning to see that our drive had successfully taken us out of the channel, back onto the magnesium sulfate-bearing unit, into which the channel is incised. Our long-anticipated investigation of the channel has proven fruitful: Curiosity made the first definitive detection of elemental sulfur on Mars, and we have examined a variety of intriguing lithologies and relationships within the deposit over the last 4.5 months. It has been an exciting time, and I have particularly enjoyed riding this wave with my fellow Channel Surfers — a great team! Now to make sense of all the fantastic data we have collected. We are not completely done looking at the channel and deposits though. We will be driving parallel to the western margin for a while to facilitate comparisons with what we observed from the east. Tosol we will image two areas of interest within the Gediz Vallis channel from our current vantage point with Mastcam and ChemCam long-distance RMI. But back to the sulfate unit — the team planned a number of activities to document the return to the sulfate unit. These include APXS and MAHLI of the nodular bedrock immediately in front of the rover (“Sub Dome”), ChemCam LIBS and Mastcam of another bedrock block (“Vert Lost Grove”), and Mastcam of the resistant bedrock ridge immediately adjacent to the Gediz Vallis channel (“Muah Mountain”). Once the drive of about 25 meters (about 82 feet) hopefully executes successfully, Curiosity will look down and image the terrain between her front wheels with MARDI, acquire ChemCam LIBS on an autonomously selected target in the workspace, and then perform a series of atmospheric and environmental observations. These include a Mastcam tau to measure dust in the atmosphere, Navcam dust devil and suprahorizon movies, and a Navcam line-of-sight observation. The plan is rounded out with DAN, RAD, and REMS activities. Written by Lucy Thompson, Planetary Geologist at University of New Brunswick Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4323-4324-surfin-our-way-out-of-the-channel/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

Captured by Curiosity's MAHLI camera on September 29, 2024 (Sol 4318) For scale the Lincoln Penny has a diameter of 0.75 inches (19.05 mm) Fun fact: They used a 1909 Lincoln VDB penny for the calibration target as the rover was supposed to launch during 2009, 100 years after the coin was minted and 200 years after the birth of Abraham Lincoln. Technical issues delayed the launch, but the penny was already fitted to the calibration target. Can anyone spot the Martian in the image? :)

It's had a tough journey, but it's still trucking

Pulled away from the workspace to provide better access to the fractured bedrock target with the rover's robotic arm 15 frame mosaic of deBayered L-MastCam images NASA/JPL-Caltech/MSSS/fredk


Check out the online map using this link https://mars.nasa.gov/maps/location/?mission=Curiosity

Leaning Back, Driving Back - Curiosity Rover Blog for Sols 4309–4310 Earth planning date: Wednesday, September 18, 2024 The lengthy drive planned on Monday executed as expected, and we came in today to find our rover parked at a jaunty angle on a sloped ridge. There were some worries that the slope might limit our ability to use the arm for contact science in this plan (we don't want to do anything that might cause the rover to slide down the slope!), but after some careful consideration, we received the good news that all six of our wheels are holding on firmly to the ground, so there was no risk of slipping. On Monday, two different options for today's plan were laid out. The first option, a "full contact science" plan where we don't drive, was to be executed if Monday's drive put us exactly where we hoped. The second, a "touch-and-go" plan where we do some light contact science before driving away, was to be executed if the drive didn't put us where we wanted to be. As it happened, the rover was a little too enthusiastic about driving, and actually put our desired workspace under its body rather than in front where the arm could reach it. There's always a little uncertainty in the final position after such a long drive! So, we decided to stick with a touch-and-go plan that includes a tiny backwards drive of less than a metre to reposition our desired target in front of the rover. Although we need to re-position, we aren't slowing down on science for even a second. We are parked in front of a large fractured slab of bedrock, which can be seen in the above image. This slab became the contact science target for this plan with DRT and APXS activities on "The Minster." Mastcam is getting a workout today as well, with large mosaics of "North Channel," "Buckeye Ridge," "Quinn," and "Island Pass." These mosaics are all documenting various aspects of the ridge we're sat on and the edge of the Gediz Vallis Channel, including sedimentary rocks, white sulphate materials, and gravels and fine-grained materials. ChemCam is also taking a turn on the bedrock slab with a LIBS activity on "Grand Sentinel" and a mosaic of some exposed white stones off in the distance. The second sol of the plan, after our short drive, is largely taken over by environmental science activities, though there is our usual post-drive ChemCam AEGIS. These activities include a Mastcam tau and Navcam line-of-sight to measure the amount of dust in the atmosphere around and above us, as well as a dust devil movie, suprahorizon cloud movie, and some Navcam deck monitoring to see if our driving or the wind is moving around any of the sand and dust on the rover deck. The team is also taking the usual set of REMS, RAD, and DAN observations. Written by Conor Hayes, Graduate Student at York University Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4309-4310-leaning-back-driving-back/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

De-Bayered L-MastCam mosaic - Assembled in MS-ICE NASA/JPL-Caltech/MSSS/fredk

Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover's robotic arm, during September 17, 2024 (Sol 4307). The camera focus motor count (returned with the image) can be used to calculate the camera standoff distance (camera lens to the target). In this case the standoff was close to 25 centimeters (~10 inches). This provides an image scale of ~95 micrometers per image pixel, or a scene width of ~15 centimeters (~6 inches). Image Credits: NASA/JPL-Caltech/MSSS.

Awaiting drive data and the location. While we're waiting for those details, I have assembled a selection of the post drive L-NavCam images into a small mosaic, clearly showing the low ridge in front of the rover that was discussed in the last mission update.
 science.nasa.gov
science.nasa.gov
Bright Rocks Catch Our Eyes - Curiosity Rover Blog for Sols 4307-4308 Earth planning date: Monday, September 16, 2024 We made good progress through Gediz Vallis in the weekend drive, landing in a segment of the channel containing a mix of loose rubble and other channel-filling debris. Amongst the jumbled scene, though, particular objects of interest caught our eye: bright rocks. In past workspaces in Gediz Vallis, similar bright rocks have been associated with very high to almost pure sulfur contents. As all good geologists know, however, color is not diagnostic, so we cannot assume these are the same as sulfur-rich rocks we have encountered previously. The only way to know is to collect data, and that was a significant focus of today’s plan. We planned multiple mosaics across the examples of bright rocks visible in the image above. Mastcam and ChemCam RMI will cover “Bright Dot Lake” and “Sheep Creek” both in the right midfield of the image. Mastcam imaged the example in the bottom right corner of the image at "Marble Falls,” and ChemCam LIBS targeted one of the small bright fragments along the bottom of the image at "Blanc Lake.” There was also a small bit of bright material in the workspace, but unfortunately, it was not reachable by APXS. APXS analyzed a spot near the bright material, at target “Frog Lake,” and MAHLI was able to tack on a few extra images around that target that should capture the bright material. MAHLI also imaged a vuggy target in the workspace at “Grasshopper Flat.” The wider context of the channel was also of interest for imaging, so we captured the full expanse of the channel with one Mastcam mosaic, and focused another on mounds distributed through the channel at target "Copper Creek." Even with all this rock imaging, we did not miss a beat with our environmental monitoring. We planned regular RAD, REMS, and DAN measurements, mid and late day atmospheric dust observations, a cloud movie, and dust devil imaging. Our drive is planned to take us up onto one of the ridges in the channel. Will we find more bright rocks there? Or something new and unexpected that was delivered down Gediz Vallis by some past Martian flood or debris flow? Only the channel knows! Written by Michelle Minitti, Planetary Geologist at Framework Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4307-4308-bright-rocks-catch-our-eyes/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

The reasons for the drive on sol 4306 are detailed in this mission update https://science.nasa.gov/blog/sols-4304-4006-12-years-42-drill-holes-and-now-1-million-chemcam-shots/

This data is updated and released by JPL via it's JSON URL's after each drive. I import the JSON data into this table to make it easier to digest If anyone wants to check the JSON, you can find it on this URL. https://mars.nasa.gov/mmgis-maps/MSL/Layers/json/MSL_waypoints.json

This drive was downslope to site 108.2792. The new site is 4.31 meters (14.14 ft) lower than the previous site 108.2528. The rover is pointing towards the Southwest (228.34°) The end-of-drive image is from the rover left-side navigation camera. Credits: NASA/JPL-Caltech

L-MastCam de-Bayered mosaic, roughly assembled in MS-ICE using 15 overlapping frames. It features the terrain accessible to the rover's robotic arm credits: NASA/JPL-Caltech/fredk
 science.nasa.gov
science.nasa.gov
West Side of Upper Gediz Vallis, From Tungsten Hills to the Next Rocky Waypoint - Curiosity Rover Blog for Sols 4302-4303 Earth planning date: Wednesday, Sept. 11, 2024 The rover is on its way from the Tungsten Hills site to the next priority site for Gediz Vallis channel exploration, in which we plan to get in close enough for arm science to one of the numerous large dark-toned "float" blocks in the channel and also to one of the light-toned slabs. We have seen some dark blocks in the channel that seem to be related to the Stimson formation material that the rover encountered earlier in the mission, but some seem like they could be something different. We don't think any of them originated in the channel so they have to come from somewhere higher up that the rover hasn't been, and we're interested in how they were transported down into the channel. We aren't there yet, but the 4302-4303 plan's activities include some important longer-range characterization of the dark-toned and light-toned materials via imaging. Context for the future close-up science on the dark-toned blocks will be provided by the Mastcam mosaics named "Bakeoven Meadow" and "Balloon Dome." The broad Balloon Dome mosaic also covers a low dome-like structure formed by the light-toned slab-like rocks (pictured). Smaller mosaics will cover a pair of targets that include contacts where other types of light-toned and dark-toned material occur next to each other in the same block: "Rattlesnake Creek" which appears to be in place, and "Casa Diablo Hot Springs," which is a float. The rover's arm workspace provided an opportunity for present-day aeolian science on the sandy-looking ripple, Sandy Meadow. Mastcam stereo imaging will document the shape of the ripple, while a suite of high-resolution MAHLI images will tell us something about the particle size of the grains in it. The modern environment will also be monitored via a suprahorizon observation, a dust devil survey, and imaging of the rover deck to look for dust movement. The workspace included small examples of the dark float blocks, so the composition of one of them will be measured by both APXS and ChemCam LIBS as targets "Lucy's Foot Pass" and "Colt Lake" respectively. In the meantime, the Mastcam Boneyard Meadow mosaic will provide a look back at the Tungsten Hills dark rippled block along its bedding plane to try to narrow down the origin of the ripples and the potential roles of water vs. wind in their formation. Communication remains a challenge for the rover in this location. During planning, the rover's drive was shifted from the second sol to the first sol in order to increase the downlink data volume available for the post-drive imaging, thereby enabling better planning at the science waypoint we expect to reach in the weekend plan. However, maintaining communications will require the rover to end its drive in a narrow range of orientations, which could make approaching our next science target a bit tricky. We'll find out on Friday! Written by: Lucy Lim, Planetary Scientist at NASA Goddard Space Flight Center Edited by: Abigail Fraeman, Planetary Geologist at NASA-JPL Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4302-4303-west-side-of-upper-gediz-vallis-from-tungsten-hills-to-the-next-rocky-waypoint/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

On Monday 19th August 2024, the millionth laser shot on Mars by ChemCam, one of the instruments on NASA's Curiosity rover, was planned by French teams at CNES. Two days later, on Wednesday August 21, at around 8.20 pm French time, the millionth ChemCam shot was fired at Mars. This was Sol 4281, the 4281st Martian day of the mission. The data were received on Thursday August 22nd for analysis by the American team. The target of this millionth shot: a fragment of rock, named Royce Lakes, which was broken by the rover itself when it rolled over it. The whitish interior of the rock, contrasting with the orange-red appearance of the Martian surface, immediately caught the eye of the scientists. Other recent observations were decisive in the choice of this target: sulfur crystals were discovered in a valley on Mount Sharp, which the rover is currently climbing. Scientists are wondering whether this rock will have the same properties... As usual, several measurement points were made on this target, 5 in all. And on each point, several shots: 30 in all. Each shot provides new information and enriches the Martian composition database. This millionth shot represented the 11th shot on the 4th point. ChemCam's mission is to measure the chemical composition and image the rocks and soil on the surface of Mars. The French hardware contribution to ChemCam was built on a partnership between CNES, CNRS-INSU, several universities (Toulouse, Bordeaux, Paris, Lorraine, Lyon) and CEA. ChemCam is under the joint scientific responsibility of Los Alamos National Laboratory (LANL) in New Mexico (USA), and the Institut de Recherche en Astrophysique et Planétologie (IRAP, France) of the Observatoire Midi-Pyrénées in Toulouse. CNES plays a major role in its operational and technical operation, in conjunction with the Jet Propulsion Laboratory (JPL, USA) and research laboratories on both sides of the Atlantic. Read the full news release that includes additional images, and the spectra measured on this target on this link: https://cnes.fr/en/news/1-million-shots-chemcam-mars Credits: NASA/JPL-Caltech/CNES/LANL/IRAP/LPGN/IAS/CNRS/MSSS
Curiosity rover is exploring a scientifically exciting area on Mars, but communicating with the mission team on Earth has recently been a challenge due to both the current season and the surrounding terrain. In this Mars Report, Curiosity engineer Reidar Larsen takes you inside the uplink room where the team talks to the rover. See why Curiosity’s location in Gediz Vallis channel makes it difficult to send direct commands — and how the team ensures they always stay connected to the rover. Curiosity landed in 2012 to look for evidence that Mars’ Gale Crater had the conditions to support microbial life in the ancient past. Curiosity has confirmed those conditions existed on the crater floor as well as on various parts of Mount Sharp, the 3-mile-tall (5-kilometer-tall) mountain within the crater that the rover has been ascending since 2014.

Rippled Pages - Curiosity Rover Blog for Sols 4300-4301 Earth planning date: Monday, Sept. 9, 2024 With today’s plan, Curiosity completes its most southerly planned exploration of the Gediz Vallis channel. From here, our rover will head north and climb out of the channel to explore terrain to the west. Our planned drive to the “Tungsten Hills” rocks, named for a famous mining district near Bishop, California, completed successfully over the weekend, placing a pile of unusual dark rocks within our workspace. Curiosity is currently in the “Bishop” quadrangle on our map, so all targets in this area of Mount Sharp are named after places in the Sierra Nevada and Owens Valley of California. On sols 4300-4301, Curiosity will perform a thorough examination of these rugged boulders, which are covered in paper-thin sedimentary layers like the pages of a book (see image). Some layers have intriguing ripple structures that may have formed in running water or windblown sand. These features are the prime targets for contact science and remote observation at this location. On Sol 4300, Curiosity will obtain ChemCam laser spectra and Mastcam imagery on a part of the closest plate-like rock called “Bonita Flat,” after a high valley above the southern Kern River canyon in Sequoia National Forest. ChemCam will also obtain telescopic views of a section of the Gediz Vallis channel banks with its RMI camera. Mastcam will take a mosaic of the upper reaches of the channel, then turn its cameras on the interesting bedrock of “Coffeepot Canyon,” honoring a ravine along the precipitous East Fork of the Kaweah River canyon in Sequoia National Park, unfortunately now engulfed in a huge wildfire. The first science block ends with atmospheric observations, including a dust-devil movie, supra-horizon cloud imaging, and Mastcam measurement of dust in the air across the crater. Curiosity will then use its arm to brush the dust from the closest block in an area dubbed “Pond Lily Lake,” for a petite meadow lake atop the canyon wall of the San Joaquin River, downstream of Devil’s Postpile National Monument. This cleared spot will then be imaged by MAHLI and Mastcam, and its composition will be measured by APXS spectroscopy. MAHLI will perform an intricate “dog’s eye” maneuver to obtain detailed images of ripples in “Window Cliffs,” named after sheer walls above the spectacular fault-controlled Kern River canyon west of 14,505-foot Mount Whitney, the tallest peak in the lower 48 states. MAHLI wraps up a very full day of work by imaging the scalloped edge of the largest nearby block, dubbed “Boneyard Meadow” for a wetland in the western Sierra foothills where many sheep sadly perished due to a late spring snowstorm in 1877. Early on sol 4301, Curiosity will use Mastcam to thoroughly document the Tungsten Hills in pre-sunrise morning light. Later in the day, a second science block starts with ChemCam spectroscopy and Mastcam imagery of “Castle Domes,” honoring the granite domes of Castle Valley, acclaimed as some of the most beautiful mountain scenery in Kings Canyon National Park. ChemCam RMI will perform telescopic observations of the channel floor. Mastcam will look for possible sulfur rocks at the base of the Tungsten Hills blocks in a target named “Hummingbird Lake,” for an alpine lake at 10,000 feet between Bloody and Lundy Canyons near Mono Lake. This science block of the plan ends with Navcam deck monitoring, dust measurement, and a large dust-devil survey. Curiosity will then drive north, taking a MARDI “sidewalk” video of the terrain under the rover during the drive. Written by Deborah Padgett, OPGS Task Lead at NASA's Jet Propulsion Laboratory Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4300-4301-rippled-pages/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

This Way to Tungsten Hills - Curiosity Rover Blog for Sols 4297-4299 Earth planning date: Friday, Sept. 6, 2024 Curiosity completed an impressive 60-meter drive (about 197 feet) across the channel floor within Gediz Vallis and parked along the edge of a shallow linear depression. Just about 20 meters (66 feet) away, an intriguing dark, textured rock named “Tungsten Hills” is the destination for our weekend drive and our contact science on Monday. Today I served as the “Keeper of the Plan” for the Geology theme group and worked with the science team to compile a variety of contact science and targeted science in this three-sol plan. Contact science in our immediate workspace includes a joint effort by MAHLI and APXS to characterize a gray rock with two targets named “Big Baldy” and “Big Bird Lake.” ChemCam focused its Laser Induced Breakdown Spectroscopy (LIBS) instrument on a rock with a reddish coating, “Purple Creek,” and a light-toned rock, “Garlic Meadow,” to determine their chemical composition. ChemCam included a long distance RMI image of the yardang unit that caps Mount Sharp as well as a standard post-drive AEGIS activity, which allows autonomous target selection for upcoming geochemical spectrometry. The Mastcam team assembled several beautiful mosaics to document Curiosity’s surroundings. One mosaic will extend the imaging of the current workspace and is planned at dusk to take advantage of the diffuse lighting. Two separate mosaics, one of which is in stereo, will characterize the floor of the depression in front of Tungsten Hills to investigate the exposed light rocks and document depositional processes. Finally, a stereo mosaic will image Tungsten Hills and the surrounding terrain in advance of our approach over the weekend. With the weekend plan in place the science team will now patiently wait for data to be returned and for planning to resume on Monday! Written by Sharon Wilson Purdy, Planetary Geologist at the Smithsonian National Air and Space Museum Source for this blog and the archive of all blogs (with all the links and the original raw images etc): https://science.nasa.gov/blog/sols-4297-4299-this-way-to-tungsten-hills/ These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public. Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status. Image credits: NASA/JPL-Caltech

NASA/JPL-Caltech/UofA


10 overlapping images NASA/JPL-Caltech/MSSS/fredk

Sol 4298: Front Hazard Avoidance Camera (Front Hazcam) after a drive to site 108.2162, Waiting data for the drive (at this time)

Close up - MAHLI camera standoff ~25 cm. Image scale ~95 micrometers per pixel, or a scene width of ~15 cm (6 inches) Image rotated to closer match those from the rover's other cameras NASA/JPL-Caltech/MSSS

Assembled from 10 overlapping Bayer reconstructed L-MastCam subframe images. For those who missed the earlier mission update, the L-MastCam has a stuck filter wheel, so about half of the full frame images are now obscured by the jammed filter wheel. Luckily the team can command sub-frame images, but they need more images to build the mosaics. You'll also note that the images have slightly darker borders which MS-ICE sometimes fails to blend during assembly, but it's great we can still get some great images from the camera. NASA/JPL-Caltech/MSSS/fredk

One of many darker float rocks just beyond the rover's workspace. This mosaic was assembled using MS-ICE and then cropped from a larger mosaic. The crop is made up of around 6 overlapping Bayer-reconstructed R-MastCam full frames. NASA/JPL-Caltech/MSSS/fredk


After a walkabout studying the local terrain, Curiosity heads back South along its notional path

When the rover reaches a new location the team often commands a MastCam mosaic of the terrain in the direction of the rover's notional path (towards its next waypoint). I believe this is likely one of those occasions.